








http://www.mateksys.com/downloads/setup_optic%20flow_in_INAV_rev1.pdf
Specifications
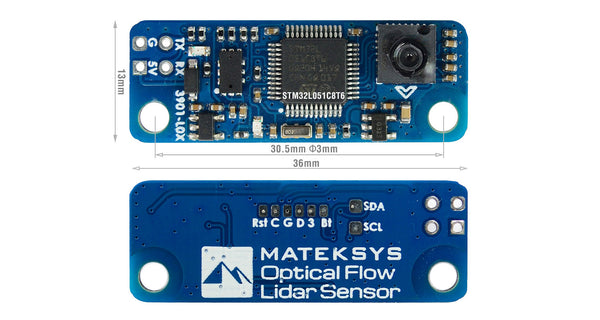
- Optical Flow: PMW3901
- Lidar: VL53L0X
- Interface UART
- Protocol: MSP
- Working Range: 8cm~200cm
- Field of view: 42 degree(PMW3901), 27 degree(VL53L0X)
- Minimum Illumination >60Lux
- Input voltage: 4.5~5.5V
- Power Consumption: 40mA
- Size: 36*12mm (F051 version), 2g
- Size: 36*13mm (L051 version) 2g
Packing
- Module 3901-L0X, 1pc
Tips
- Make sure Optical Flow lens to ground >2cm for OpenFlow initialization while FC starting up.
- Maximum range of VL53L0X is 2m, Altitude hold 0~2m @ throttle 0~100% if VL53L0X is enabled.
- Any unused UART of FC supports it
- Sonar connection (Trig & Echo) has not been implemented
- If your flight controller doesn’t have a barometer detected, you won’t be able to select “NAV ALTHOLD” in modes tab.
ArduPilot Setup
Thread https://discuss.ardupilot.org/t/msp-protocol-support/57944
ArduPilot latest firmware has supported MSP protocol since Sep.02
- SERIAL_PROTOCOL = 32
- SERIAL_BAUD = 115
- RNGFND_TYPE = 32
- FLOW_TYPE = 7
MSP V2 protocol
Communication between 3901-L0X module and Flight controller via UART MSP V2 protocol supported by INAV and ArduPilot.
There is no detailed datasheet of MSP V2 protocol.
Pls refer the code in INAV and ArduPilot Github


![APD F-Series 200F3[X] v2 14S 200A 60V 32-Bit ESC](http://demonpowersystems.com/cdn/shop/products/apd02_{width}x.jpg?v=1634665384)
![APD F-Series 200F3[X] v2 14S 200A 60V 32-Bit ESC](http://demonpowersystems.com/cdn/shop/products/apd02_grande.jpg?v=1634665384)
