



















-
MANUAL (15M)
FC Specifications
- MCU: 216MHz STM32F722RET6
- IMU: MPU6000 & ICM20602, Dual Gyros built-in (SPI)
- Baro: BMP280 or DPS310(I2C)
- OSD: AT7456E (SPI)
- Blackbox: MicroSD card slot (SPI)
- 5x Uarts (1,2,3,4,6) with build-in inversion
- 1x Softserial supported
- 8x Dshot/Proshot/oneshot outputs
- 1x I2C
- 4x RX6 pad(one per cornet) for BLheli32 ESC telemetry
- 4x individual ESC power/signal pads
- 1x Group of G/S1/S2/S3/S4 pads for 4in1 ESC Signal/GND
- 3x LEDs for FC STATUS (Blue, Green) and 3.3V indicator(Red)
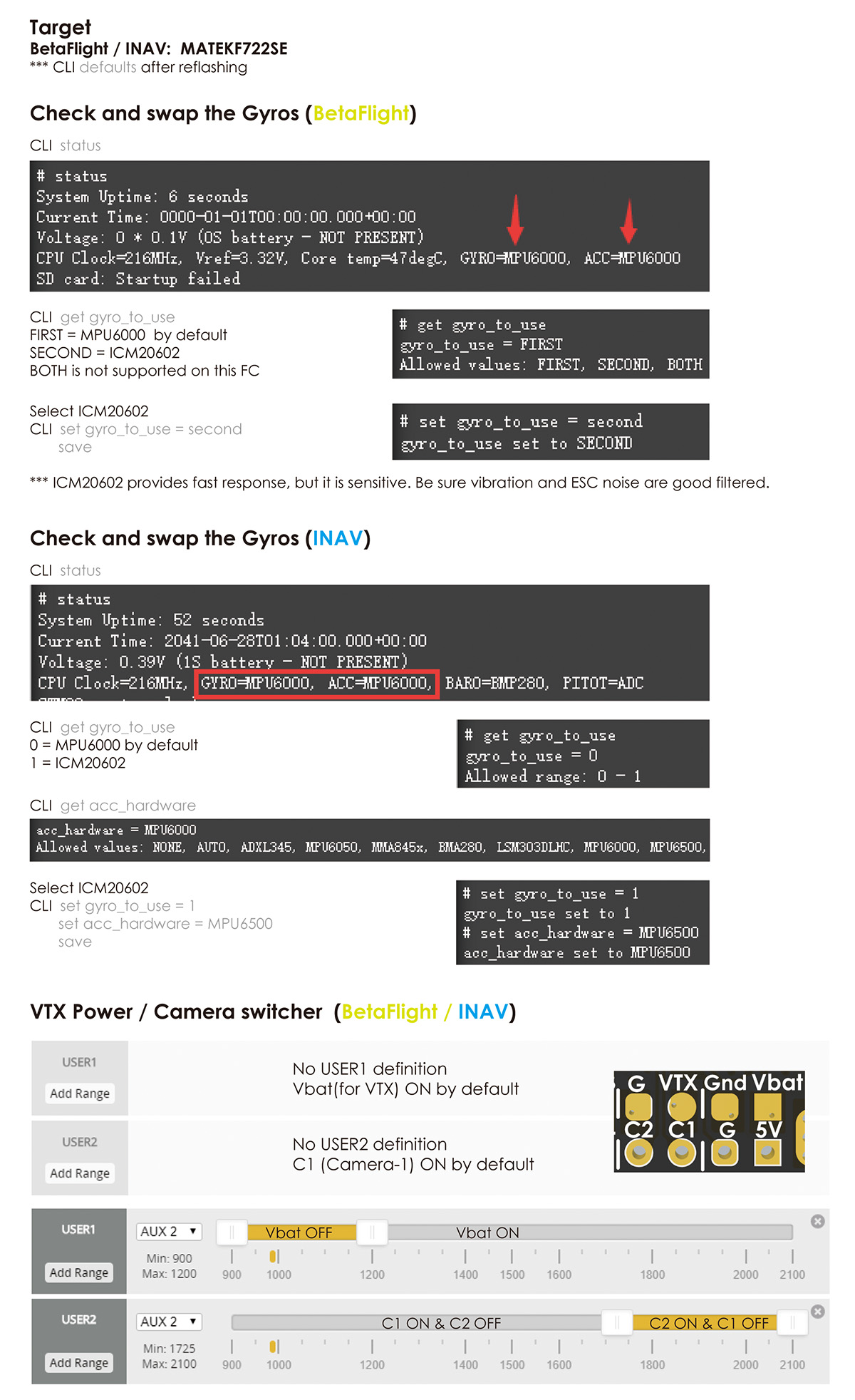
- Vbat filtered output power for VTX, Switchable via AUX (modes tab-user1)
- Dual Camera image switchable via AUX (modes tab-user2)
- Camera control: Yes
- Smartaudio & Tramp VTX protocol: Yes
- WS2812 Led Strip : Yes
- Beeper : Yes
- RSSI: Yes
- Additional ADC for INAV analog airspeed
PDB Specifications
- Input: 6~36V (3~8S LiPo) w/TVS protection
- PDB: 4x35A (Max.4x46A)
- BEC: 5V 2A cont. (Max.3A)
- LDO 3.3V: Max.200mA
- Current Sensor 184A (Scale 179)
- Battery Voltage Sensor: 1:10 (Scale 110)
FC Firmware
- BetaFlight / INAV
- Target: MATEKF722SE
Physical
- Mounting: 30.5 x 30.5mm, Φ4mm with Grommets Φ3mm
- Dimensions: 36 x 46 mm
- Weight: 10g
Including
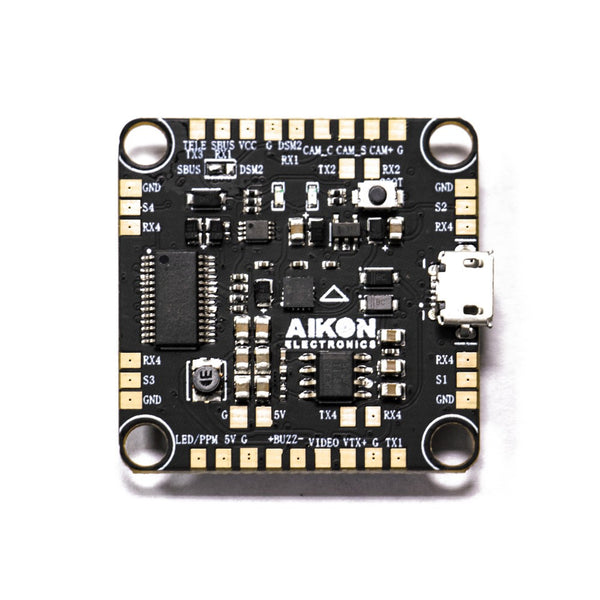
- 1x FC F722-SE
- 6x silicon grommets M4 to M3
- 1x FR4 PCB Plate 36*36*1mm
- 1x Rubycon ZLH 35V/470uF (Low ESR)
| Pad Hole |
Pin name |
Function | BetaFlight | BetaFlight | INav | INav | INav | INav | INav |
| Octo | Quad | Tricopter | Quad X | Hex X | Flying Wing | Airplane | |||
| S1 | PB4 | TIM3_CH1 | motor-1 | motor-1 | motor-1 | motor-1 | motor-1 | servo | servo |
| S2 | PB5 | TIM3_CH2 | motor-2 | motor-2 | motor-2 | motor-2 | motor-2 | servo | servo |
| S3 | PB0 | TIM3_CH3 | motor-3 | motor-3 | motor-3 | motor-3 | motor-3 | servo | |
| S4 | PB1 | TIM3_CH4 | motor-4 | motor-4 | motor-4 | motor-4 | servo | ||
| S5 | PA15 | TIM2_CH1 | motor-5 | motor-5 | servo | ||||
| S6 | PB3 | TIM2_CH2 | motor-6 | motor-6 | servo | ||||
| S7 | PB6 | TIM4_CH1 | motor-7 | servo | servo | servo | motor-1 | motor-1 | |
| S8 | PB7 | TIM4_CH2 | motor-8 | servo | servo | motor-2 | motor-2 | ||
| LED | PA8 | TIM1_CH1 | 2812LED | 2812LED | 2812LED | 2812LED | 2812LED | 2812LED | 2812LED |
| RX2 | PA3 | TIM9_CH2 | RX2/ppm | RX2/ppm | RX2/ppm | RX2/ppm | RX2/ppm | RX2/ppm | RX2/ppm |
| TX2 | PA2 | TIM9_CH1 | TX2/pwm1 | TX2/pwm1 | |||||
| RX4 | PA1 | TIM5_CH2 | RX2/pwm2 Cam_Ctrl |
RX2/pwm2 Cam_Ctrl |
|||||
| TX4 | PA0 | TIM5_CH1 | TX4/pwm3 | TX4/pwm3 | |||||
| PA4 | PA4 | ADC | / | / | AirSpeed | AirSpeed |

-
-
F722-SE DPS310 ver. and previous BMP280 version have same layout and components except for barometer & battery pads style.
- INAV2.5.x and Betaflight 4.2.x downloaded from configurator don’t support new barometer DPS310.
- DPS310 has been supported officially by INAV2.6/ BetaFlight 4.3 and new configurator.
- For now, pls download customized INAV2.5.x and BetaFlight 4.2.x below.
inav_2.5.1_MATEKF722SE_DPS310.hex
If Baro can’t be detected automatically. In INAV CLI mode, type command
- set baro_hardware = DPS310
- save
betaflight_4.2.3_MATEKF722SE_DPS310.hex
betaflight_4.2.8_MATEKF722SE.hex
If Baro can’t be detected automatically. In BF CLI mode, type command
- set baro_bustype = I2C
- set baro_i2c_device = 1
- set baro_i2c_address = 118
- set baro_hardware = DPS310
- save
-
You might also like





Regular price
$49.99
— Sold Out